Argos data filters
There are two filters in Movebank designed for Argos Doppler data that Data Managers can use to identify and flag location records as outliers:
See Section 10.5 for instructions to run the filters. If Argos data are being imported to Movebank through a live feed, these filters can also be automatically applied to incoming data. Argos filters work with Argos Doppler locations calculated using both the least squares analysis and Kalman filter methods (read more).
Data requirements: Argos filters require both location estimates provided by Argos as well as the LC (Argos location class) attribute. In addition, the Best of Day filter in the Douglas Argos Filter uses the Argos IQ and Nb mes attributes, and you will need these attributes in your data for the filter to run. Argos IQ values without leading 0s, such as provided by Argos WebService, will give the same results as 2-digit values (for example, a value of "06" will be processed the same way as a value of "6"). If your data are missing some of this diagnostic information, see the FAQ for advice. If these attributes are available for some but not all records in the dataset, the filters may run but provide unexpected results.
Preprossessing: In addition to applying the filters as described below, as a first step of filtering, Movebank runs an algorithm to identify Argos "mirror" (Solution 2) locations that are likely to be the better of the two Argos location estimates, and in these cases will store the Solution 2 coordinates as the Movebank latitude and longitude attributes—this happens in about 3% of cases (Douglas et al. 2012). The algorithm chooses between the Solution 1 and Solution 2 locations along an animal’s track by determining the set of points that results in the shortest path through all combinations of both sets of locations, ignoring class Z locations. The algorithm then makes a second pass to fill in either the primary or alternate class Z locations. Distances are calculated as great circle routes (orthodromes) using the World Geodetic System 1984 reference ellipsoid.
The chosen Argos filter settings are then applied to this improved set of locations. Both sets of coordinates remain stored in your dataset. These changes will not be reverted if you later clear your Argos filter settings. You can also manually select which solution to use as the "correct" location in Movebank using "Argos valid location manual".
Simple Argos filter
The Simple Argos Filter is based on location classes provided by Argos for Argos Doppler-based locations and stored in the Argos LC attribute.
After initiating the filter, the options look like this:

Choose the least accurate location class that you want to be retained by the filter. For example, if you only want to exclude locations Argos indicates as failed (location class Z), select B (the location class with the least accurate locations not considered failed). Points with the location class B and all more accurate classes will be retained, and only class Z points will be marked as outliers. The location classes are listed in order of increasing accuracy (Z being least accurate and G being most accurate).
In addition, the Simple Argos Filter applies two additional steps:
- If there are multiple rows with the same tag ID and timestamp, it will flag duplicates, retaining the record with the higher-quality location class and nbmes value.
- Any records missing a location class value will be flagged as outliers.
Douglas Argos Filter
The Douglas Argos Filter allows you to filter Argos data by flagging locations that exceed thresholds for distance between consecutive locations, and velocity and bearing between consecutive movement vectors. It was originally developed by David Douglas from the U.S. Geological Survey Alaska Science Center and has been re-implemented for Movebank (thank you David!). For more information, see the following resources:
- Douglas et al. 2012, Methods in Ecology and Evolution
- the Douglas Argos Filter manual
- our video tutorial
After initiating the filter, the options look like this:
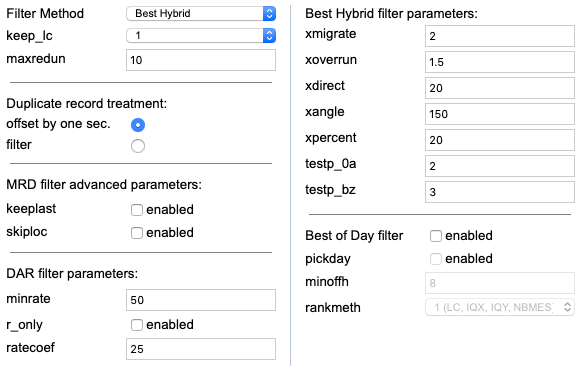
The parameters you need to provide depend on the chosen filter method, as described below.
Filter methods
- MRD: Retains subsequent points which are closer than maxredun together.
- DAR: Retains points which correspond to a realistic rate of movement and which do not form tight angles.
- Best Hybrid: Combines the results of MRD and DAR filters for migratory species.
Parameters required by all filters
-
keep_lc: Points with an location class (LC) better or equal to this are always retained.
-
maxredun: Radius in km within which 2 points are considered self-confirming.
-
duplicate record treatment: This parameter is unique to the implementation of the Douglas Argos Filter in Movebank. Occasionally, two Argos location records will have identical timestamps. This can happen when two satellites pass over an animal at the same time, or if you import data from multiple sources with overlapping records to your study. Movebank can treat the records with duplicate timestamps in two ways:
- offset by one sec: Temporarily offset duplicate timestamps by 1 second (recommended). To allow the Douglas Argos Filter to judge the plausibility of both location estimates, this option temporarily offsets one timestamp by one second while running the filter. The original timestamps are unchanged. This can result in a filtered dataset in which two records with duplicate timestamps are retained but will ensure that both records are tested using the filter parameters you have set.
- filter: Flag records with duplicate timestamps as outliers, while retaining one of the records if it meets the filter requirements. If both records with duplicate timestamps are identical, the last imported record is retained. If both records are not identical, the record with the better LC is retained; if the LC is the same, then the record with the better nb_mes is retained.
MRD filter advanced parameters
- keeplast: Retain the last location for each animal.
- skiploc: Consider 5 consecutive locations, and call them A, B, C, D, and E. The MRD filter considers consecutive triplets of locations; the first triplet would then be A, B, and C. Three distances are calculated: AB, BC, and AC. If any of the 3 distances are less than maxredun, the two respective end-point locations are retained by the filter. In the case location ‘B’ is rejected: if skiploc = 0, then location ‘B’ is considered, and the next triplet would be B, C, D; and the 3 distances BC, CD, AND BD would be evaluated. If skiploc=1, then location ‘B’ is not considered (it is skipped), and the next triplet would be C, D, E; and the 3 distances CD, DE, and CE would be evaluated. Past feedback indicates most users prefer skiploc = 0.
DAR filter parameters
- minrate: Maximum realistic rate of movement in km/h.
- ratecoef: Determines the minimum accepted turning angle among 3 subsequent points as a logarithmic function of the distance moved. Overall, tighter angles are accepted with smaller movement distances. ratecoef serves to tune that relationship. Larger values for ratecoef will be less tolerant of acute turning angles, resulting in a more directional movement path. Smaller values of ratecoef will be more tolerant of acute turning angles. ratecoef values between 10 and 25 have been most commonly prescribed.
- r_only: Skip the angle test, filter only based on the rate of movement.
Best hybrid filter parameters
The parameters xmigrate and xoverrun determine if a sequence of points is considered a migration event.
- xmigrate: Determines the minimum distance of a migration event.
- xoverrun: Determines how much of a detour is accepted for a migration event. The following parameters determine if a point which is part of migration event is considered realistic.
- xdirect: A limit for the deviation from a straight line.
- xangle: A limit for the deviation from a straight line.
- xpercent: A limit for the deviation from a straight line.
- testp_a: Number of limits which need to be met if location class (LC) is better or equal than A.
- testp_bz: Number of limits which need to be met if location class (LC) is equal or worse than B.
Best of Day filter parameters
The Best of Day filter selects one position ("Best of Day") per day or duty cycle. It is applied after the regular filtering procedure.
- pickday: Choose "Best of Day" per GMT day, otherwise it is selected per duty cycle.
- minoffh: Maximum time lag between 2 subsequent measurements in a duty cycle. Only relevant if pickDay = false.
- rankmeth: Determines which criteria are used in which order to pick the best point within a duty cycle.
- Option 1: Use LC, IQX, IQY, NBMES
- Option 2: Use LC, IQX, NBMES, IQY
- Option 3: Use LC, NBMES
Quality control of uploaded data
Define deployments and outliers
Argos data filters